|
|
 |
联结件・不锈钢规格・KE-SS系列
本体材质采用奥氏体系不锈钢,具有良好的耐蚀性。因为防松螺栓上有特殊润滑涂层所以组装时无需涂抹润滑油或润滑脂。适用于洁净室及腐蚀气氛环境。 |
| |
 产品描述: 产品描述: |
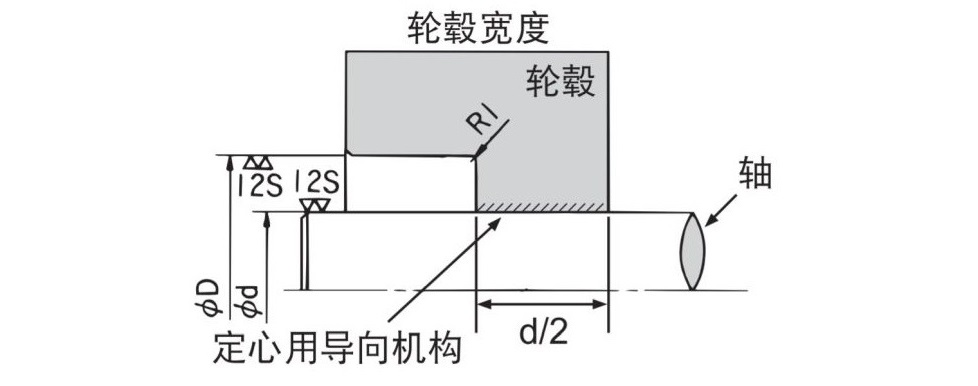
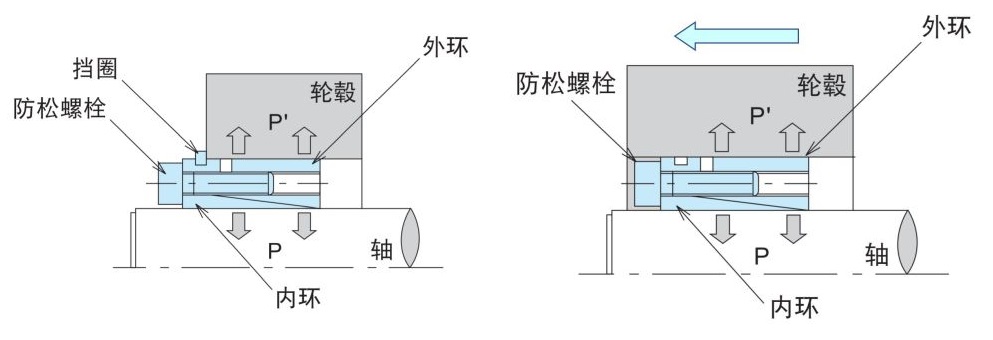
产品概述KE产品由内环,外环,固定螺栓构成,仅需打紧固定螺栓即可强力联结 构造简单,零件数少, 性价比优异 小径尺寸品种齐全,内外径比小的结构 适用于小径轴,小径轮毂,小型马达,也适合于步进电机,伺服电机的输出轴的联结 具有自动定心功能,轮毂部无需麻烦的定心导向部加工 组装时轮毂不会移动 KE-SS系列适用轴径:Φ5~Φ50,扭矩范围:7.5~836N・m ,适用面粗糙度:Ra1.6 对应大范围的轴外径公差:h6, h7,h8,(h9, h10),js6, js6, k6, m6。轮毂内径公差:H8 轴公差以h8为标准。对于h9、h10公差轴,或是加工有键槽的轴,传送扭矩减少10% KE-SS不锈钢产品可对应伺服电机等正公差轴 本体材质采用奥氏体系不锈钢,具有良好的耐蚀性 因为防松螺栓上有特殊润滑涂层所以组装时无需涂抹润滑油或润滑脂 传导扭矩高,抑制发生面压,可对应小径轮毂 适用于洁净室及腐蚀气氛环境
产品特点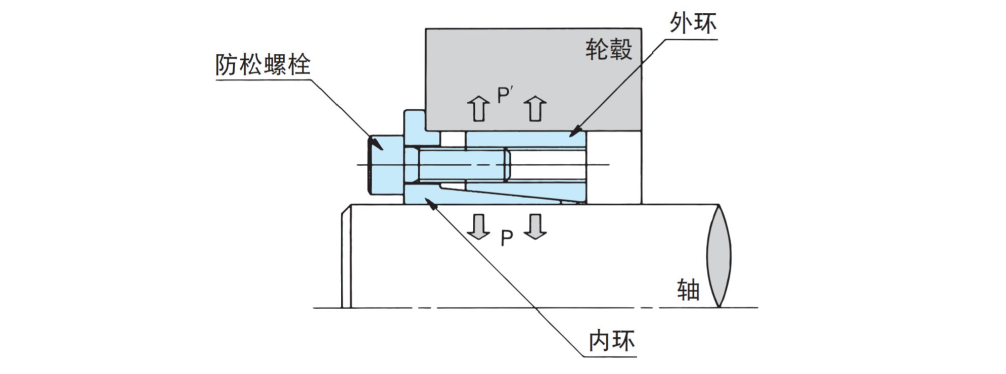
使用方法CNC机床-刀具更换用吊臂 工具交换用的工具臂,不仅用于加工中心,也用于复合车床中。最近的工具交换臂以惊人的高速·高频度交替施加负载,因此键连接困难。EF系列,KE系列可用此类的工具交换臂 商业胶印机-滚辊间的间隙调整用齿轮的联接 采用于商业胶印机的应用。胶印机在几个滚辊间传送纸张时染色,由于纸张的厚度和质量的不同,需要用齿轮构成的复杂的联杆机构来调整各滚辊间的间隙。由于这种调整需要非常高的精度,需要采用无背隙联结件 半导体晶片搬运机器人-大型液晶玻璃搬运机器人 在无尘室中使用的移载操作机器人也采用椿本联结件。操作机器人具有多个关节部,其驱动使用皮带滑轮。因使用伺服电机或步进电机驱动,有精度要求,不可使用有背隙的键连接。小容量时一般采取D形切削或螺母固定,大容量时使用联结件 因在洁净室中使用,所以采用联结件的耐环境规格系列。多在高洁净环境下使用的半导体晶片搬运机器人均采用不锈钢系列,清洁度较低(1000级以上)的FPD关联搬运时主要采用无电解镀镍规格
|
| |
| 型号规格: |
规格描述 型号表示 | PL | 005 | X | 016 | KE-SS | | | | | |
| | | | | | 产品名 | 轴径 |
| 外径 | 系列名 | | Power Lock(日本产) | 005:5mm |
| 016:16mm | KE-SS不锈钢系列 |
| 006:6mm |
| 017:17mm |
|
| ~ |
| ~ |
|
| 048:48mm |
| 070:70mm |
|
| 050:50mm |
| 072:72mm |
|
尺寸参数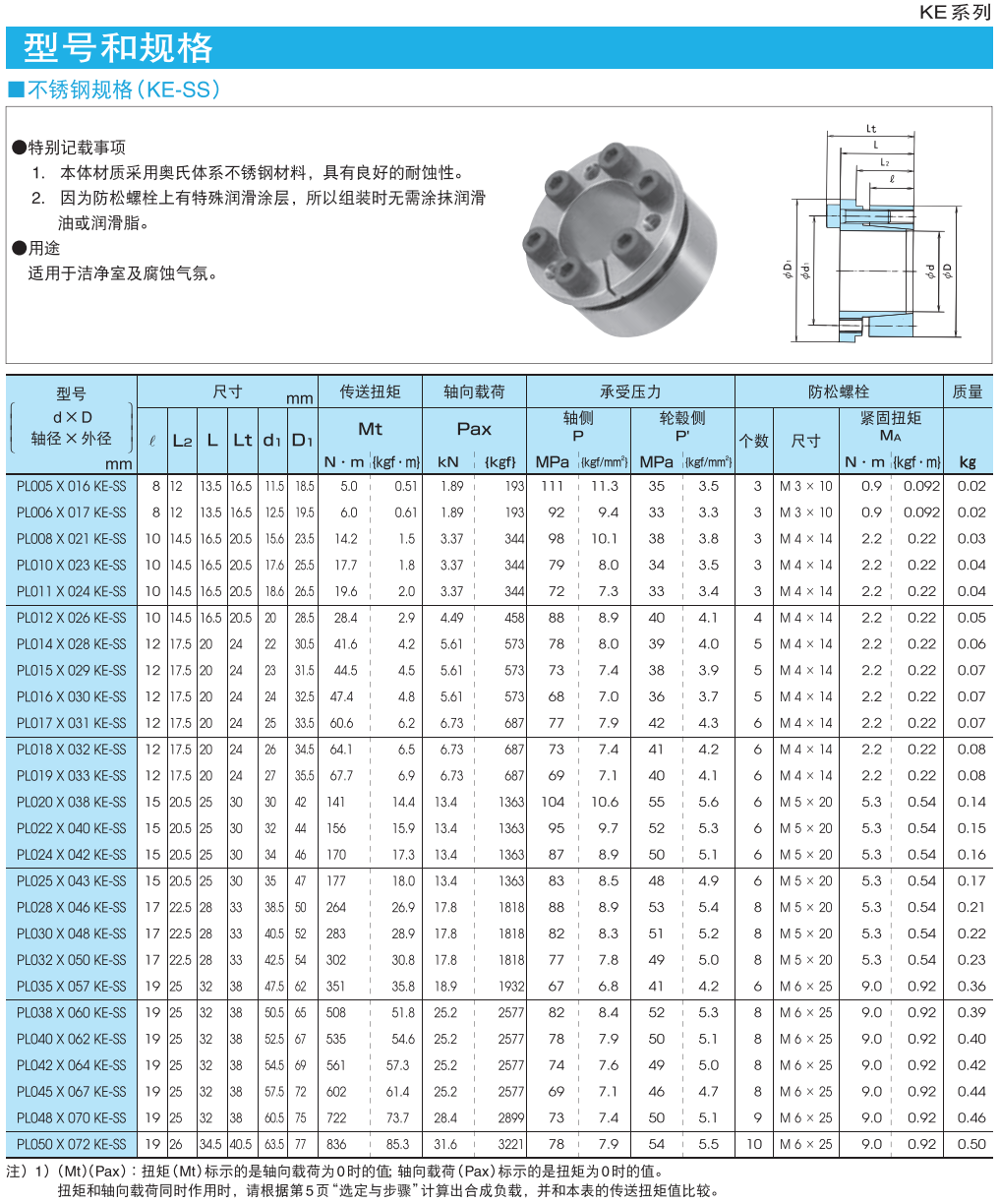 型号一览(点击PL型号可显示产品详细信息)
|
|